実はクモって調教できる?合図に従ってジャンプするハエトリグモ(英研究)※蜘蛛出演中

image credit:Lucas the Spider
お手とかおすわりとか、犬は人間の指示に従い行動することが可能なことはよく知られているが、なんとクモだって、ちゃんとしつければ芸を覚えてくれるのだ。
科学者らは、ハエトリクモが獲物を捕らえる秘訣を解明しようと、いろいろな距離と高さでジャンプするようにトレーニングした。もちろん世界初の試みだ。
・クモの体の仕組みを解明する研究
イギリス・マンチェスター大学の研究チームが実施したのは、3Dスキャンと高解像度ハイスピードカメラを利用してクモの動きを記憶・解析しようという最先端の研究である。
『Nature Scientific Reports』に掲載された研究論文の目的は、ハエトリグモの体と行動が現在のように進化した理由に答えることと、その理解に基づいて新型の小型ロボットを作り出すことだ。
「現在の研究の焦点は、クモの並外れた跳躍力にあります。ハエトリグモは静止状態から体長の6倍もの距離を跳ぶことができます。人間の場合、最高でも1.5倍程度です。飛ぶ瞬間に足にかかる力は、体重の5倍に達します。この素晴らしい生体メカニズムを解明できれば、それを他の研究分野に応用できるようになります」と、この研究を率いたモスタファ・ナバウィ博士は話す。

・ハエトリグモを訓練、指示に応じてジャンプできるように
博士らは「キム」と名付けたクモを訓練し、研究所内に作られた人工プラットフォーム上でいろいろな距離と高さをジャンプできるようにした。
キムはリーガルジャンプスパイダー(学名 Phidippus regius)というハエトリグモの仲間のメスだ。体長15ミリ、体重150ミリグラムで、野生では草原や林などに生息する。

・ハエトリグモのジャンプの戦略
超ハイスピードカメラでジャンプシーンを撮影し、それを解像度0.0072ミリというマイクロCTスキャンで測定。ここから足と体の構造の詳細な3Dモデルを作成した。
その結果、ジャンプの難易度に応じて、クモはいくつかの戦略を用いていることが明らかになった。
Scientists train spider to jump on demand
例えば、短距離ならば、キムは速く低い軌道のジャンプを好む。これは多くエネルギーを使うが、飛行時間を短縮できる。そのためジャンプの精度が上がり、獲物を効果的に捕獲できる。
しかし距離が長かったり、高低差があったりする場合、そしておそらくは荒地などを移動するような場合は、エネルギー消費を減らすために効率的なジャンプを行う。
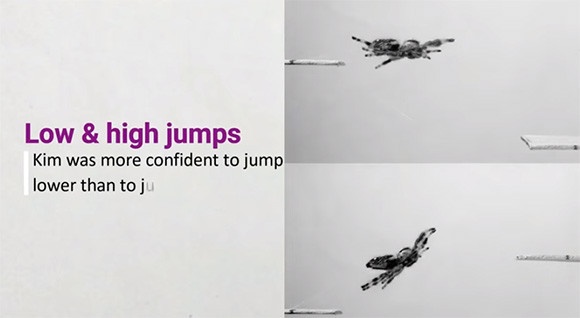
また高い場所へ跳ぶ場合と低い場所へ跳ぶ場合は、低い場所への跳躍の方が得意なようだ。
さらにジャンプ直前に糸を安全ベルトとして地面につけることも分かった。これは空中での安定性を高める効果もあると考えられている。
・実験後も謎が残るクモのジャンプ
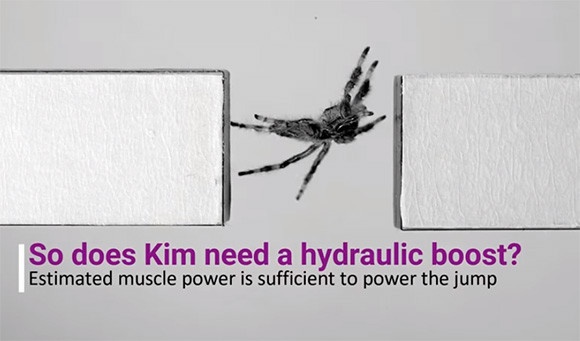
昆虫やクモのジャンプにはいくつもの方法があるが、バネのようなメカニズム、筋肉の直接的な力、あるいは体液の圧力のいずれかを用いている。
クモが体液の圧力で足を伸ばすことは50年前から知られていたが、それが跳躍の際に筋肉を補強するものなのか、それとも筋肉の代わりに使うものなのかどうかは不明である。
「私たちの結果からは、キムが油圧制御で足を動かせる一方、驚異的な跳躍力を発揮するために体液による補強は必要ないことが示唆されています。したがって、クモの油圧駆動の役割は相変わらず謎のままです」と共著者のビル・クラウザー博士は話す。
・実験をもとに小型ロボットを作るもうまくいかず
なお、判明した知見を元に小型ロボットの作成が試みられたが、材質は十分でありながらも、小さなスケールで作ることは非常に難しく、さらに力や制御の点でもクモにはまだまだ太刀打ちできなかった。
今後はジャンプ中の圧力の測定や制御戦略の研究を行い、最終的に同じサイズのロボット開発を目指すそうだ。
というか、クモが調教できるという点が今回のびっくりポイントだと思う。猫の調教ですら難しいのに、クモが指示に応じてジャンプするとかすごすぎない?
References:boingboing / manchester/ written by hiroching / edited by parumo













