世界最先端! 九州工業大学で開発された「自律型ロボット」がすごい!
- タグ:
-
学生ジーニアス調査隊
-
機械
-
理系
-
実験
-
大学生
ロボットについて研究している学部を持つ大学はたくさんあります。その中でも九州工業大学の「社会ロボット具現化センター」の取り組みは注目されています。先日、自律型ロボットによる資源(コバルトリッチクラスト層)探査に成功しましたが、この開発に携わるなど、社会で役立つロボットの開発に取り組んでいるのです。今回は同センターについて取材しました。
九州工業大学 社会ロボット具現化センターのホームページを見るとわかりますが、こちらのセンターでは非常にアクティブにロボット関連の活動に取り組んでいます。人間とロボットランナーの混成チームがそのタイムを競い合う「学研ヒルズ学際駅伝大会」、トマトを収穫するロボットの出来を競い合う「トマトロボット競技会」、樹木の生育状況を観測するための「森のドローン・ロボット競技会」が開催されるなど、さまざまなイベントが活発に実施されています。
■日本のロボット技術は世界でも最先端ですが……
九州工業大学 社会ロボット具現化センター、センター長の浦環(うら たまき)さんにお話を伺いました。
――非常に面白く、ユニークな活動をされているようですが、このセンターはどのような意図でできたものでしょうか?
浦先生 日本はロボット先進国といわれていますし、また実際技術的には最先端のものを持っています。あちこちでロボットのコンテンストが開かれていますし、また各大学でいろんな研究がされています。
でも、今日(取材日)は3.11ですが、あの大地震が起こったときに、例えば原子炉で活躍するロボットなどはなかったし、被災現場でロボットが活躍したという話は聞きませんでしたね。これはなぜだろう? と。もっと社会で活躍する、社会で役立つロボットの開発に取り組まなければならないのではないか。そういう意図で3年前に設立されました。
※……取材日は2016年3月11日でした。
――なるほど。
浦先生 大学で行っているロボット研究を社会で役立つロボットにつなげていかないと、そのうち大学におけるロボット研究は行き詰まってしまうのではないか、そういう思いもあります。
■「できる」のと「ニーズに応える」のは違う!
――先日発表された自律型海中ロボットについては、海洋資源探査の推進に役立つと大変注目されましたが。
浦先生 今までの資源探査では、バック(船上)に人間がいてROV(遠隔操作無人探査機)を操作して海底からサンプルを取ってくる、というものだったのですが、この自律型ロボットでは全自動でコバルトリッチクラスト層の探査を行います。
ドリリングをしてマニピュレーターでサンプルを採取することを遠隔操作でやる代わりに、現場でそこに鉱物資源があるかをその場で確認します。自動でデータを取って移動するので広範囲の探査が可能です。
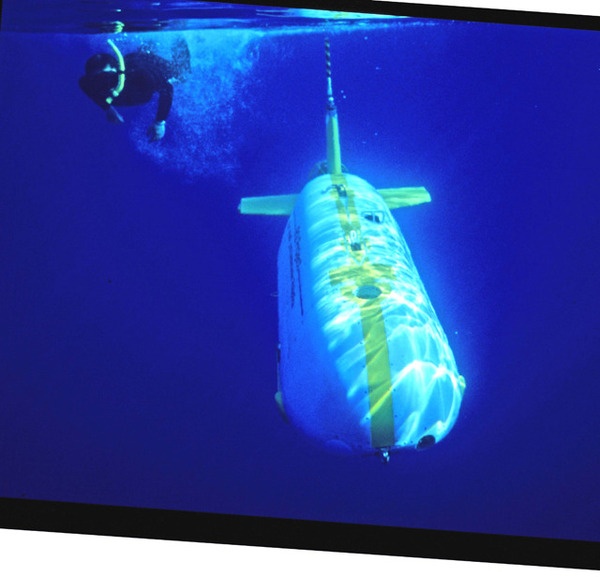
↑『r2D4』。4,000メートルの深度まで潜ることのできる航行型AUV。水平分解能のよい海底の地形図を素早く作ることができます。
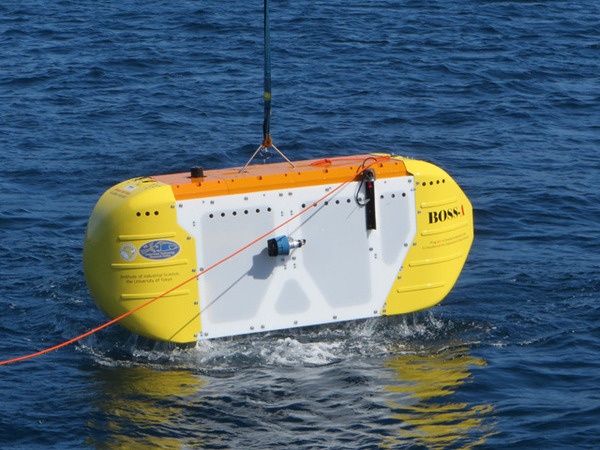
↑『BOSS-A』。コバルトリッチクラストの厚さを測るために作られたAUV。拓洋第五海山を観測しました。
――すばらしい成果ですね。ロボットはあちこちの現場で求められているようですが。
浦先生 介護現場や第一次産業などロボットを使いたいという場面はたくさんありますが、どこもあまりうまくはいっていないですね。それは、そもそも「人間をリプレースしよう」という考え方が間違っているからです。
ロボット側からの視点というか、ロボットに何ができるのか、どういうことだったらロボットにやらせられるか、が考えられていないことがほとんどだからです。
――なるほど。
浦先生 例えば、今回の海中自律型ロボットですと、海底をドリルで掘ったり、サンプルを回収したりといったことは自律型ロボットは苦手です。ドリリングのためのエネルギーも要りますしね。その代わりに、センサーでコバルトリッチクラスト層のデータをその場で取得する、これならできる。また自律型ロボットなので人間の助けを借りずにずっと稼働できます。ロボットの使い方、使いどころを考えないと現場ではなかなかうまくいかないのです。
――ロボットを使いたいというニーズに応える方法が必要ということでしょうか?
浦先生 先日も議論していたのですが、「wants(ウォンツ)」と「needs(ニーズ)」は違うということです。「こうしてほしい」は「wants」で、これはロボットはたいてい実現できない。「私の代わりをしてほしい」とかは駄目なのです。
「needs」はもっと現実に即した要求です。「needs」には応えることができますが、そのやり方をロボット側からの視点で工夫しないとできません。例えば、トマトを採り入れるロボットを開発するとして……。
――サイトを拝見すると、トマトを収穫するロボットのコンテストを行っていらっしゃいますね。
浦先生 はい。でもこれがなかなか難しい(笑)。人間の代わりにトマトを収穫するロボットはできるでしょう。でも、「できる」と「ニーズに応える」のは違うんです。
1台1,000万円とかになったらそれは誰も買わないし、利用してくれない。「できました」といっても「ふーん」で終わってしまうでしょう。10万円で「使えるもの」ができるかが問われているんです。
どんな場面で、どんなことが求められ、どうすれば役に立つのかを考えないからです。人間をリプレースするものを考えるのではなく、ロボットらしい解決法こそ考えるべきことなのです。
■森林の整備・メンテに利用できるロボットの開発!
――先生が次に開発したいロボットとはどのようなものですか?
浦先生 いろいろあるんですが……、森の維持管理がロボットで対応できないかと考えています。林業に従事している人から「きこりロボット」ができないものか、といわれています。
――なるほど。林業に従事している人が減って、森林のメンテが大変という話をよく聞きますね。
浦先生 ただこれは大変に難しい。人間の代わりに木を切るロボットを作るというのはできない。先ほど申し上げたとおり、人間をリプレースするのではなく、ロボットに何ができるのか、こういうやり方だったらロボットはできるよ、という発想の転換が必要なんです。
僕たちができるのは、森林の管理に役立つロボットです。例えば、森林の植生を調べるという仕事があります。これは木の育成状況を知る上で大事な仕事です。現在は、人間が森林に分け入って調べています。これをセンサーを積んだドローンを飛ばしてできないか、とかね。
――いいプランですね。ドローンの技術も向上していますし。
浦先生 それでも難しい点がたくさんあるんです。例えば、深い森林になるとGPS信号が受信しにくいですし、また木の枝が邪魔になってうまく飛べないとか。そういう困難をどうやってクリアするのか、ここがロボット屋の腕の見せどころなわけです。
――「森のドローン・ロボット競技会」を開催されている理由はそういう点にあるのですね。
浦先生 他にも大事な「下刈り」という作業があります。植林して育てている木の周りに下草が生えるから、これを刈らなくてはなりません。これも今は人力で行っています。これをロボットにやらせることができないか、と。
――そういえば、ゴルフ場でも最近は全自動の芝刈りロボットが活躍していますね。
浦先生 あれはなぜロボットできるかというと毎日刈っているからなんですよ。刈るとしても1cmとか丈の短いものでしょう。下刈りでは丈の高いものなどがあるとロボットにはなかなか難しい。だから、最初の1回だけ人間がやって、丈の高いものをなくしてしまいます。
大変な作業ですが最初だけは人間がやって、後は毎日ロボットがやれば走りやすいし刈りやすい。やり方をロボット向きに変えるのです。そういう風に考えればお金も掛からないし、ロボットを作りやすいのです。
――人間を丸々リプレースしようとするとロクなことにならないわけですね。
浦先生 何だったらロボットにできるか、どういう風にすればロボットがやりやすいかを考えてやらないと駄目なんですよ。
――たくさんプロジェクトを手掛けていらっしゃるようですが……。
浦先生 もう年取っちゃったから(笑)、こういうのやろう! と掛け声を掛けてるだけですけどね。
――学生さんたちはどうような活躍をされていますか?
浦先生 下刈りロボットは林研究室の学生が作っていますよ。ベースのアイデアは先生が出していますが、九州工業大学の学生たちがロボットを作っています。
陸上のロボットは壊れたらすぐ助けに行けるからいいんだけど、海中のロボットはそうもいかないので、重要な部分は企業に発注しています。ソフトは学生がやったりするけど、それでも間違ってると大変なので企業に協力を依頼することが多いですね。海の現場はなかなか厳しいですよ(笑)。
――ありがとうございました。
社会で役立つロボットというと、つい鉄腕アトムみたいなものを考えがちですが、それでは駄目なようです。ロボットに何をどのようにやらせるかを考えた上で作られなければ、本当に社会の役に立つものはできないのですね。
『九州工業大学 社会ロボット具現化センター』
公式サイト
http://www.lsse.kyutech.ac.jp/~sociorobo/
(高橋モータース@dcp)













